Note
Go to the end to download the full example code
Scoring of structures¶
This examples illustrates how to use IMP.bff.AVNetworkRestraint for
scoring structures in a trajectory.
import json
import tqdm
import pylab as plt
import RMF
import IMP
import IMP.rmf
import IMP.atom
import IMP.bff
Load an RMF file and create a hierarchy
print("Creating IMP Model")
m = IMP.Model()
rmf_fn = IMP.bff.get_example_path("structure/T4L/t4l_docking.rmf3")
print("Loading RMF")
frame_index = 0
f = RMF.open_rmf_file_read_only(rmf_fn)
hier = IMP.rmf.create_hierarchies(f, m)[frame_index]
IMP.rmf.load_frame(f, RMF.FrameID(frame_index))
Creating IMP Model
Loading RMF
Load fps.json file and create restraint for scoring
print("Creating FRET restraint")
fps_json_path = IMP.bff.get_example_path("structure/T4L/fret.fps.json")
with open(fps_json_path) as fp:
fps_json = json.load(fp)
score_set_c1 = "chi2_C1_33p"
fret_restraint = IMP.bff.AVNetworkRestraint(
hier, fps_json_path,
score_set=score_set_c1
)
v = fret_restraint.unprotected_evaluate(None)
Creating FRET restraint
Score each frame in the RMF file and plot score
print("Scoring frames")
scores = list()
for frame in tqdm.tqdm(f.get_root_frames()):
IMP.rmf.load_frame(f, frame)
v = fret_restraint.unprotected_evaluate(None)
scores.append(v)
Scoring frames
0%| | 0/100 [00:00<?, ?it/s]
2%|▏ | 2/100 [00:00<00:07, 13.75it/s]
4%|▍ | 4/100 [00:00<00:07, 13.22it/s]
6%|▌ | 6/100 [00:00<00:07, 13.22it/s]
8%|▊ | 8/100 [00:00<00:06, 13.63it/s]
10%|█ | 10/100 [00:00<00:06, 13.84it/s]
12%|█▏ | 12/100 [00:00<00:06, 14.01it/s]
14%|█▍ | 14/100 [00:01<00:06, 14.14it/s]
16%|█▌ | 16/100 [00:01<00:05, 14.21it/s]
18%|█▊ | 18/100 [00:01<00:05, 14.08it/s]
20%|██ | 20/100 [00:01<00:05, 14.09it/s]
22%|██▏ | 22/100 [00:01<00:05, 13.76it/s]
24%|██▍ | 24/100 [00:01<00:05, 13.70it/s]
26%|██▌ | 26/100 [00:01<00:05, 13.43it/s]
28%|██▊ | 28/100 [00:02<00:05, 13.61it/s]
30%|███ | 30/100 [00:02<00:05, 13.83it/s]
32%|███▏ | 32/100 [00:02<00:04, 14.08it/s]
34%|███▍ | 34/100 [00:02<00:04, 13.94it/s]
36%|███▌ | 36/100 [00:02<00:04, 14.13it/s]
38%|███▊ | 38/100 [00:02<00:04, 14.25it/s]
40%|████ | 40/100 [00:02<00:04, 14.25it/s]
42%|████▏ | 42/100 [00:03<00:04, 14.29it/s]
44%|████▍ | 44/100 [00:03<00:03, 14.38it/s]
46%|████▌ | 46/100 [00:03<00:03, 14.51it/s]
48%|████▊ | 48/100 [00:03<00:03, 14.49it/s]
50%|█████ | 50/100 [00:03<00:03, 14.65it/s]
52%|█████▏ | 52/100 [00:03<00:03, 14.69it/s]
54%|█████▍ | 54/100 [00:03<00:03, 14.63it/s]
56%|█████▌ | 56/100 [00:03<00:02, 14.81it/s]
58%|█████▊ | 58/100 [00:04<00:02, 14.94it/s]
60%|██████ | 60/100 [00:04<00:02, 14.96it/s]
62%|██████▏ | 62/100 [00:04<00:02, 14.65it/s]
64%|██████▍ | 64/100 [00:04<00:02, 14.68it/s]
66%|██████▌ | 66/100 [00:04<00:02, 14.86it/s]
68%|██████▊ | 68/100 [00:04<00:02, 14.55it/s]
70%|███████ | 70/100 [00:04<00:02, 14.59it/s]
72%|███████▏ | 72/100 [00:05<00:01, 14.66it/s]
74%|███████▍ | 74/100 [00:05<00:01, 14.79it/s]
76%|███████▌ | 76/100 [00:05<00:01, 14.86it/s]
78%|███████▊ | 78/100 [00:05<00:01, 14.86it/s]
80%|████████ | 80/100 [00:05<00:01, 14.91it/s]
82%|████████▏ | 82/100 [00:05<00:01, 14.95it/s]
84%|████████▍ | 84/100 [00:05<00:01, 14.94it/s]
86%|████████▌ | 86/100 [00:05<00:00, 14.97it/s]
88%|████████▊ | 88/100 [00:06<00:00, 15.00it/s]
90%|█████████ | 90/100 [00:06<00:00, 14.99it/s]
92%|█████████▏| 92/100 [00:06<00:00, 14.97it/s]
94%|█████████▍| 94/100 [00:06<00:00, 14.97it/s]
96%|█████████▌| 96/100 [00:06<00:00, 15.14it/s]
98%|█████████▊| 98/100 [00:06<00:00, 15.32it/s]
100%|██████████| 100/100 [00:06<00:00, 15.35it/s]
100%|██████████| 100/100 [00:06<00:00, 14.49it/s]
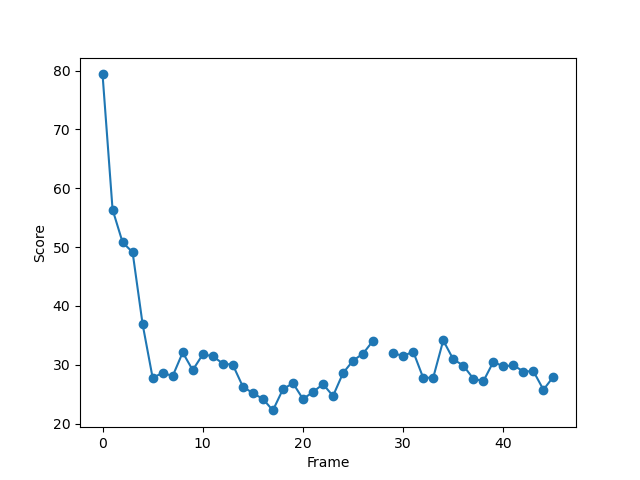
Plot score for each frame
plt.plot(scores, "o-")
plt.xlabel("Frame")
plt.ylabel("Score")
plt.show()
Total running time of the script: (0 minutes 9.380 seconds)